
Похожие статьи
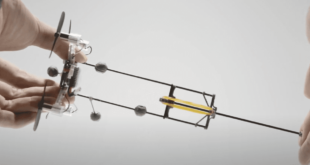

Робот-рыба с катушкой, разработанный учеными из Бристольского университета, может сделать подводные исследования более доступными.
Разработка была оснащена скрученным полимером (TCP) для перемещения вперед, легким недорогим устройством, которое зависит от изменения температуры для создания движения, что также ограничивает его скорость.
TCP работает, сокращаясь подобно мышцам при нагревании, преобразуя энергию в механическое движение. Используемый в этой работе TCP нагревается за счет джоулева нагрева — при прохождении тока по электрическому проводнику вырабатывается тепловая энергия и нагревается проводник. За счет уменьшения расстояния между TCP с одной стороны рыбы-робота и пружиной с другой, это активирует плавник сзади, позволяя рыбе-роботу развивать новые скорости.
Волнообразные взмахи ее заднего плавника были измерены с частотой 2 Гц, две волны в секунду. Частота электрического тока такая же, как частота взмаха хвостом.
Результаты, опубликованные на 6-й Международной конференции IEEE-RAS по программной робототехнике, обеспечивают новый путь к повышению частоты срабатывания TCPS — действия, приводящего в работу машину или устройство, благодаря термомеханическому дизайну, и демонстрируют возможность использования TCPS с высокой частотой в водных средах.
Ведущий автор Tsam Lung You из Бристольского отделения инженерной математики рассказывает: «Привод из скрученного полимера (TCP) — это многообещающий новый инструмент, обладающий привлекательными свойствами легкого веса, низкой стоимости, высокой плотности энергии и простого процесса изготовления».
Их можно сделать из очень легко поддающихся оценке материалов, таких как леска, они сжимаются и обеспечивают линейное приведение в действие при нагревании. Однако из-за времени, необходимого для отвода тепла во время фазы расслабления, это делает их медленными.
Ученые оптимизировали конструкцию пары мышц-антагонистов TCP-пружины и сблизили их точки крепления ближе друг к другу. Это позволило заднему плавнику поворачиваться под большим углом при том же количестве срабатываний TCP.
Хотя для этого требуется большее усилие, TCP является мощным приводом с высокой плотностью рабочей энергии и по-прежнему способен приводить в движение плавник.
До сих пор TCP’ы в основном использовались для таких приложений, как носимые устройства и роботизированные руки. Эта работа открывает больше областей применения, где TCP может быть использован, таких как морские роботы для подводных исследований и мониторинга.
Теперь команда планирует расширить масштабы и разработать робота, ловко плавающего в воде в стиле «ножевой рыбы» с приводом от TCP-сети ribbon fin, который может управлять ленточными плавниками.
Эксклюзивный перевод

О светлом будущем заботятся политики, о светлом прошлом – историки, о светлом настоящем – журналисты.
